Qt et la Robotique (Intro)
Par Jeremie le 1 Septembre 2011
Intro
Il peut etre utile de concevoir des interfaces utilisateur, pour pouvoir debuger facilement, prendre controle du robot et afficher des informations (position, niveau de baterrie, messages d'erreurs …).
Nous allons voir quels sont les possibilités que nous offre Qt et le C++ pour créer des interfaces de debug .

Principe de Qt
Qt est une biliothèque qui permet de creer des fenetres et de gérer les actions (ex: appui sur un bouton) .Elle utilise les notions de classe et d'objet du C++ ce qui rend le code simple et très lisible .
Ses principales caractéristiques sont :
- gratuit
- portable sur linux / windows / MacOs
- une tres bonne documention
- comporte une biliothèque graphique 2D
- …
- les checkBox : pour activer des options du robot
- les curseurs : pour choisir un nombre (vitesse ..)
- les boutons : pour realiser un jostik de commande
- une zonne d'envoi : pour envoyer des commandes précises au robot
- les afficheurs : pour afficher des données d'odométrie
- une zonne de texte : pour afficher un message
- une bare de progression : pour suivre le niveau de la baterrie
- une autre zonne de texte : qui permet d'afficher et de suivre l'avancement du programme
Interface de commande
Voici les principaux widgets qui peuvent servir pour commnader un robot :
.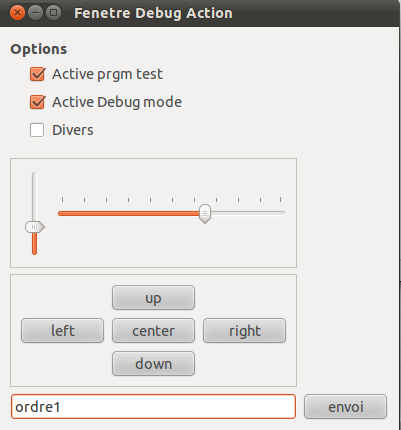
On y trouve :
Interface d'Affichage
Voici les principaux widgets qui peuvent servir pour afficher des informations sur le robot :
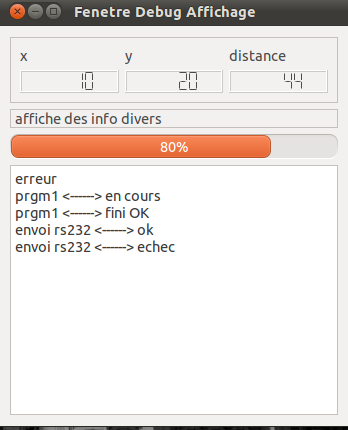
On y trouve :
Gestion du 2D avec QT
Et oui Qt dispose aussi d' une bibliothèque graphique qui permet de dessiner et faire mouvoir vos dessins !!
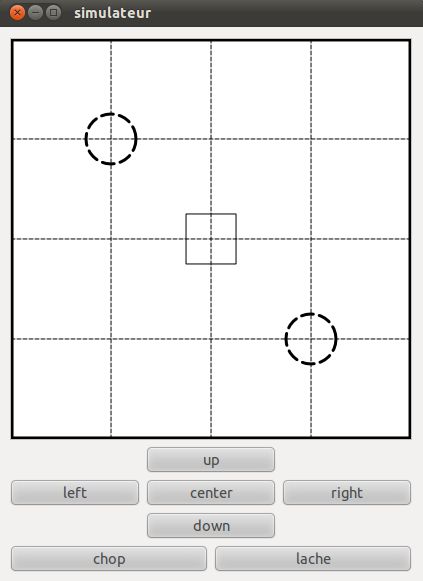
Voir la video de demo
Rq:
Avec pas mal d'heures de programation en plus on pourrait peut etre imaginer un simulateur ! Sinon on peut l'utiliser plus simplement comme une recopie de ce qui se passe sur le plateau de jeux .
Bilan
Qt semble très prometeur pour la realisation d'interface de debug , il y aurra sans doute une suite d'autres articles dans le courrant de l'année qui expliqueront notre interface de debug et le mini-simulateurs pour Eurobot 2012 .
Nous espérons que cet article vous a donné envie de vous lancer dans la création d'interface graphique avec Qt .
Voici 2 très bon tutoriels du Site Du Zero concacrés à Qt et au C++ :
Rq:
La partie dialogue entre le Pc et le Robot n'a pas était évoquée, il sera le sujet d' autres articles . On expliquera la gestion de la rs232 en C sur linux , le protocole de communication utilisé et enfin coté éléctronique nous mettrons en oeuvre une solution rs232 filaire et sans fils .